


ジェームズ・ワットによる蒸気機関の発明以来、円運動を直線運動に変換するヒンジ機構を構築することが課題になった。
チェビシェフは色々な機械のヒンジ機構の動作軌跡の研究をした。彼は初の歩行機械の発明を行った。宇宙ロケットの制御でも、ソ連はコンピュータは遅れているが、機械的制御が進んでいると言われた時代があった。これは、チェビシェフ以来の伝統によるものだ。
歩行機械の仕組みがどのようなものか、以下のサイトにある動画を見ると良くわかります.
円運動をキノコの帽子型(歩行する足の軌跡)に変換する「ラムダ・メカニズム」がミソです.キノコの帽子型の軌跡をたどる足をつければできる.
https://etudes.ru/etudes/tchebyshev-plantigrade-machine/
ロシアの偉大な数学者パフヌーティ・リヴォヴィッチ・チェビシェフは、本来の問題を厳密に解くことはできませんでしたが、それを研究する過程で、関数の近似理論と機構の合成理論を発展させました。後者を使用して、彼はラムダ・メカニズムの次元を選択しました。
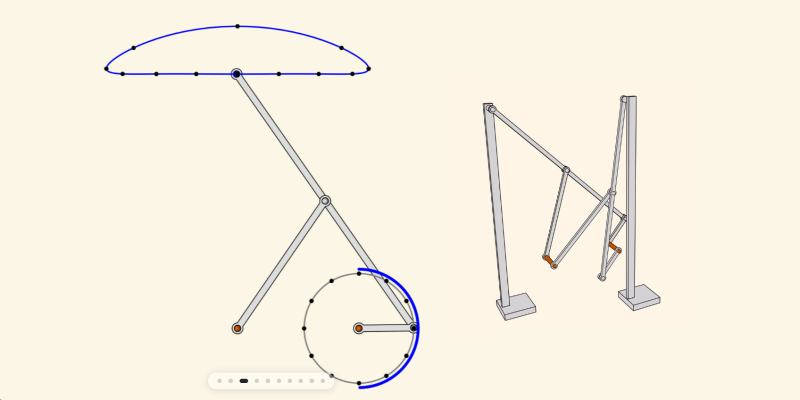
2 つの赤い固定ヒンジ、3 つのリンクは同じ長さです。ギリシャ文字の「ラムダ」に似たその外観から、ラムダ・メカニズムと呼ばれます。
小さな駆動リンクのゆるいグレーのヒンジは円を描くように回転し、駆動された青いヒンジはポルチーニ・キノコの帽子輪郭に似た軌道を描きます。
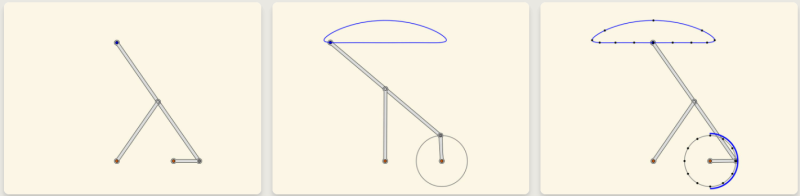
主動ヒンジの軌跡は、一様に回転する円上に等間隔に目印を打ち、それに対応する目印を自由ヒンジの軌跡に配置しました。
「キャップ」の下端は、主動リンクが円周を移動する時間のちょうど半分に相当します。 この場合、青い軌跡の下部は、厳密な直線の動きとほとんど変わりません。
キノコの帽子のほかに、青い軌道は何に見えますか?
チェビシェフは、馬のひづめの軌跡に似ていることに気づきました。

ラムダ・メカニズムに「足」のある脚をつけてみましょう。 同じ固定軸に逆位相でもう1本取り付けます。 安定性のために、すでに構築されているメカニズムの 2 本足部分のミラー コピーを追加しましょう。 追加のリンクは回転の位相を調整し、メカニズムの軸は共通のプラットフォームによって接続されます。 力学で言う世界初の歩行機構の運動ダイヤグラムが得られました。
サンクトペテルブルク大学の教授であるパフヌーティ・リヴォヴィッチ・チェビシェフは、発明されたメカニズムの製造に給料のほとんどを費やしました。 彼は記述されたメカニズムを「木と鉄で」具現化し、それを「歩く機械」と呼んだ。 この世界初の歩行機構は、ロシアの数学者によって発明され、1878 年にパリで開催された万国博覧会で一般的な承認を得ました。
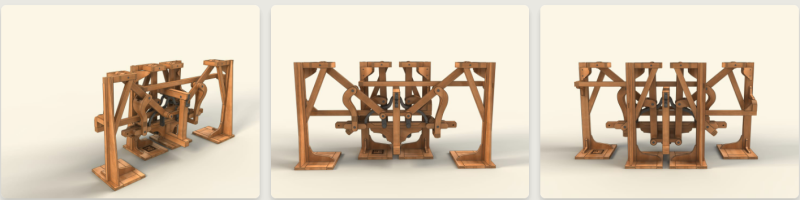
チェビシェフのオリジナルを保存し、Mathematical Etudes がこの測定をできるようにしたモスクワ工科博物館のおかげで、パフヌーティ・リヴォヴィッチ・チェビシェフの歩行機械の正確な3Dモデルが動作しているのを見ることができます。
チェビシェフの機械
https://tcheb.ru/

2021年5月16日パフヌーティ・リヴォヴィッチ・チェビシェフ(1821-1894)の生誕200年