


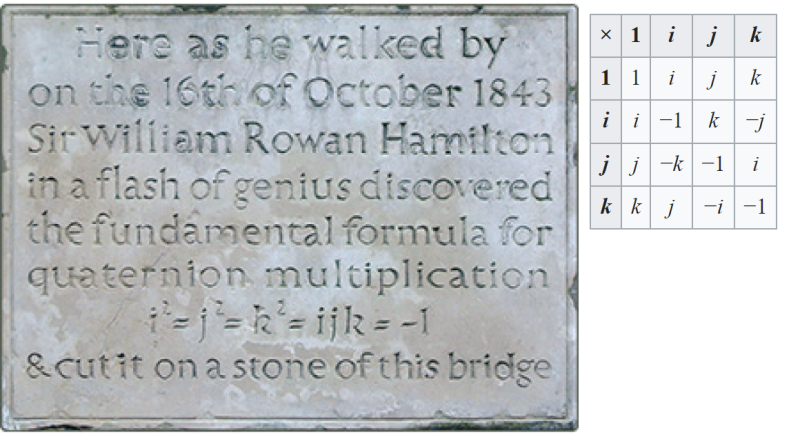
アイルランドの首都ダブリンのブルーム橋には,「1843年10月16日,この場所で,ウィリアム・ローワン・ハミルトン卿が散歩中に,天才的な洞察力で,四元数の乗法を決める公式、$${i^2 = j^2 =k^2 =ijk =-1}$$ を発見し,橋の石に書き込んだ」という石版がある. この規則は,実数の4倍体である四元数(クオータニオン:ラテン語でクオータとは「4」という意味)の掛け算を決定することができる.
四元数$${q =(a; b; c; d)}$$は,分解$${q =a +bi +cj +dk}$$と見なすことができる.ここで$${i, j, k}$$はブルーム橋の公式の「虚数単位」である.現代に至り,突然,人間とともにクォータニオンが宇宙へ飛び立った.1960年代末,宇宙船の設計者は,技術的に宇宙船にコンピュータを搭載できるようになった.地球の管制センター,宇宙飛行士とともに,コンピュータは宇宙船をコントロールしなければならない.コンピュータに求められる条件は,耐衝撃性,軽量性,高速動作,十分なメモリなどの非常に厳しいものだった. コンピュータに求められる主な仕事は,宇宙船の座標と方位を計算することで,当時,方位表現の基本的方法として,オイラー角を使う方法と回転行列法の2つがあった.しかし,いずれも実用上大きな欠点がある.第一の場合は,オイラー角による船の位置の記述が縮退してしまい,方位制御がうまくいかなくなるという危険性が生じる.また,百分の一秒,千分の一秒単位で情報を更新する必要が,軌道投入,宇宙船の降下などのアクティブな局面で必要だが,当時の計算機では対応しきれない.
こうした問題を回避する解決策を見つけたのは,中央実験機械製作設計局(S.P.コロレフの旧ОКБ-1)のスタッフたちだった. 科学者とエンジニアは,3次元空間の動きを四元数という「4次元」の言語で記述することで,オンボードコンピュータに実装できる計算しやすいモーションコントロールシステム(СУД)の開発を可能にした.3次元空間の動きは,四元数の構成要素である通常の数への代数演算(加算と乗算)として表現できる.四元数のСУДでは,記述の縮退の危険や,三角関数の値を計算し続けるためにコンピュータに負荷をかける必要がない. СУДのコースは宇宙飛行士の宇宙訓練の一環であり,すべての候補者が四元数を勉強しなければならない. 四元数による姿勢パラメータの表現は,明快さに欠けるので,通常,宇宙飛行士は訓練中に何度もリハーサルを行い,四元数を含むパラメータの制御値を暗記している. 宇宙で最も困難で責任のある作業のひとつに宇宙船のドッキングがあるが,軌道上での異常事態の1つで,四元数を「読む」能力が役に立ったエピソードを紹介しましょう.
3度目のミッションに臨むアレクサンドル・セレブロフ宇宙飛行士は,アレクサンドル・ビクトレンコとともにミール宇宙ステーションでクヴァント2号モジュールを実施する機会を得ました.自動ドッキングプログラムはすでに開始されていました.
その時,突然オンボードコンピュータのメモリがオーバーフローし,パワージャイロ(ジャイロダイン)が停止しました.手動でのアプローチとドッキングに切り替えなければならなかった.ビクトレンコはステーションの姿勢を制御し,セレブロフはスクリーンに映し出されるプロセスパラメーターを監視していた.
四元数制御システムは,その効率の良さから国際標準となり,特に国際宇宙ステーションで使用されている.3次元グラフィックスやゲーム制作のための重要なツールでもある.
引用:МАТЕМАТИЧЕСКАЯ СОСТАВЛЯЮЩАЯ
Редакторы-составители Н. Н. Андреев, С. П. Коновалов, Н. М. Панюнин
p.24-25